TianWen-1
Tianwen-1 mission is the first mission to explore Mars in China, and China become the first nation to orbit, land, release a rover, and deploy smallsats during its first foray into Martian space. Tianwen-1 consisting of 3 parts: an orbiter, lander and the Zhurong rover. The mission was launched from the Wenchang Spacecraft Launch Site on 23 July 2020 on a Long March 5 heavy-lift launch vehicle. After seven months of transit through the inner Solar System, the spacecraft entered Martian orbit on 10 February 2021. For the next three months the probe studied the target landing sites from a reconnaissance orbit. On 15 May 2021, the lander/rover portion of the mission successfully touched down on Mars.
The mission's scientific objectives include: investigation of Martian surface geology and internal structure, search for indications of current and past presence of water, and characterization of the space environment and the atmosphere of Mars. In order to complete the scientific task, it carries 13 scientific instruments, Moderate Resolution Imaging Camera, High Resolution Imaging Camera, Mars Orbiter Scientific Investigation Radar, Mars Mineralogical Spectrometer, Mars Orbiter Magnetometer, Mars Ion and Neutral Particle Analyzer, Mars Energetic Particles Analyzer onboard orbiter, and Navigation and Terrain Camera, Multispectral Camera, Mars Rover Penetrating Radar, Mars Surface Composition Detector, Mars Rover Magnetometer, Mars Climate Station onboard rover.

| MoRIC |
|---|
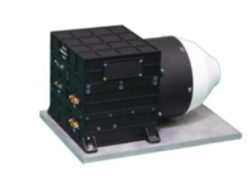
| Moderate Resolution Imaging Camera (MoRIC) is used to obtain the global image of Mars. It takes color photos in visible band with a resolution of 100 m from a 400 km altitude. |

| HiRIC |
|---|
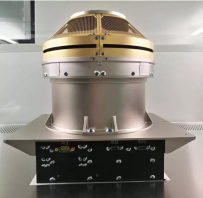
| High Resolution Imaging Camera (HiRIC) is used to obtain fine image of key areas on Mars, with a resolution of 2.5 m from a 256 km altitude in panchromatic mode, 10 m in color mode. |
| MOSIR |
|---|
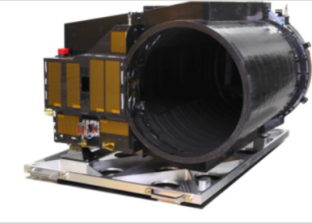
| Mars Orbiter Scientific Investigation Radar (MOSIR) aims to explore the Martian surface and subsurface water-ice by means of the dual-polarization echo characteristics of radar. It is also be used to detect the very low frequency data during the seven months of transit through the inner Solar System. |

| MMS |
|---|
| Mineralogical Spectrometer (MMS) utilizes the visible and near infrared imaging spectrometer with detection wavelengths ranging from 0.45 to 3.4 µm to investigate and analyze the Martian surface composition. It also investigate the distribution of regolith types and subsurface structure of Mars. |

| MOMAG |
|---|
| Mars Orbiter Magnetometer (MOMAG) is used to map Martian magnetic field and help understanding the mechanism of interaction between the solar wind magnetic field and Mars ionosphere. |

| MINPA |
|---|
| Mars Ion and Neutral Particle Analyzer (MINPA) measures the flux of ions in space environment, distinguishes the main ions and obtains their physical parameters such as the density, velocity and temperature. |
| MEPA |
|---|
| Mars Energetic Particles Analyzer (MEPA) obtains the energy spectrum, flux and elemental composition of energy electrons, protons, α particles and ions. |
| MarSCoDe |
|---|
| Mars Surface Composition Detector (MarSCoDe) combines laser-induced breakdown spectroscopy (LIBS), short wave infrared spectroscopy (SWIR) and micro-imaging camera. LIBS (240-850 nm) is used to analyse element composition. SWIR (850nm-2400nm) is used to analyse the minerals and rocks. Micro-imaging camera (900-1000nm) is used to obtain high resolution image of probe targets. |

| MSCam |
|---|
| Multispectral Camera (MSCam) investigates the mineral components to establish the relationship between Martian surface water environment and secondary mineral types, and to search for historical environmental conditions for the presence of liquid water. |

| NaTeCam |
|---|
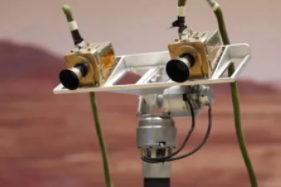
| Navigation and Terrain Camera (NaTeCam) is used to construct topography maps, extract parameters such as slope, undulation and roughness, investigate geological structures, and conduct comprehensive analysis on the geological structure of the surface parameters. |
| RoPeR |
|---|
| Mars Rover Penetrating Radar (RoPeR) obtain the martian shallow geological structure data with two frequencies, to image about 100 m (330 ft) below the Martian surface. |
| RoMAG |
|---|
| Mars Rover Magnetometer (RoMAG) obtains the fine-scale structures of crustal magnetic field based on mobile measurements on the Martian surface. |

| MCS |
|---|
| Mars Climate Station (MCS) measures the temperature, pressure, wind velocity and direction of the surface atmosphere, and as a microphone to capture Martian sounds. |

Data Access:https://moon.bao.ac.cn/web/enmanager/home